Accueil Arborescence Page précédente

© Star Wars
|
Robotique
La petite histoire Comprendre simplement Domaines de présence Son interprétation dans l'avenir Les références Mais encore |
|
by Pepe © Accueil Arborescence Page précédente |
|
© Star Wars |
|
La petite histoire Up Page Origine, raisons, hasard |
|
Comprendre simplement Up Page Vulgarisation, de 7 à 77 ans |
|
Domaines de présence Up Page K-bot  Conçue par David Hanson
(février 2003) de l'université du Texas, à Dallas,
la tête d'androïde (position D7) ressemble à une femme. Elle est capable de
reconnaître les gens et de suivre les mouvements qu'ils font grâce
aux petites caméras dont elle est équipée derrière
les yeux. Des logiciels, qui commandent de petits moteurs sous sa peau faite de
polymère, lui permettent d'imiter 28 expressions faciales humaines : K-bot
peut sourir, ricaner, froncer les sourcils et même loucher. Conçue par David Hanson
(février 2003) de l'université du Texas, à Dallas,
la tête d'androïde (position D7) ressemble à une femme. Elle est capable de
reconnaître les gens et de suivre les mouvements qu'ils font grâce
aux petites caméras dont elle est équipée derrière
les yeux. Des logiciels, qui commandent de petits moteurs sous sa peau faite de
polymère, lui permettent d'imiter 28 expressions faciales humaines : K-bot
peut sourir, ricaner, froncer les sourcils et même loucher.David Hanson estime que K-bot pourra servir de modèle aux chercheurs qui expérimentent de nouvelles technologies comme les muscles artificiels et à ceux qui testent des systèmes d'intelligence capables de reconnaître et de répondre aux gens. K-bot aura également des applications médicales, en aidant les personnes qui ont des problèmes pour communiquer ou les autistes. Un robot sous-marin  L'équipe de Gregory Dudek vient de tester leur dernière réalisation,
un robot capable de se déplacer sous l'eau. Il a été capable
de se mouvoir parmi les coraux des Barbades. Il mesure quelques dizaines de centimètres
et navigue grâce à 6 palmes utilisant les dernières avancées
en matière de robotique et de vision pour ses déplacements et la
reconnaissance du sol marin.
L'équipe de Gregory Dudek vient de tester leur dernière réalisation,
un robot capable de se déplacer sous l'eau. Il a été capable
de se mouvoir parmi les coraux des Barbades. Il mesure quelques dizaines de centimètres
et navigue grâce à 6 palmes utilisant les dernières avancées
en matière de robotique et de vision pour ses déplacements et la
reconnaissance du sol marin.
Gregory Didek affirme d'ailleurs que le monde sous-marin est nettement plus dur à maitriser que le sol martien. En effet, sur mars, il est possible d'utiliser des roues, et cette technologie est maintenant bien connue ... Il pense donc que ces recherches peuvent aboutir un jour à des projets spatiaux. |
|
Son interprétation dans l'avenir Up Page Un bras robotisé suture un coeur  On apprend dans un communiqué de Matinternet q'un canadien a subi pour
la première fois une intervention chirurgicale à une valve mitrale
du coeur avec un bras robot. Le Dr Alan Menkis (Canada) a réalisé
l'opération en quatre heures.
On apprend dans un communiqué de Matinternet q'un canadien a subi pour
la première fois une intervention chirurgicale à une valve mitrale
du coeur avec un bras robot. Le Dr Alan Menkis (Canada) a réalisé
l'opération en quatre heures.
Le bras surnommé "da Vinci" était piloté par ordinateur. Dans le monde 41 sites sont équipés de cette technologie dixit Marlene Le Bar, directrice de la société ontarienne Canadian Surgical Technologies and Advance Robotics (CSTAR), basée à Londres. Le patient, Ken Wightman, s'est remis normalement de son opération. Adept Quattro  Il s'appelle Adept Quattro. On dirait un peu une araignée
avec ses 4 bras d'ergonomie différente. Sorti de
l'imagination de cerveaux européens, il s'agit du robot
industriel manipulateur le plus rapide du monde. Conçu par
la fondation espagnole Fatronik, en collaboration avec le LIRMM
(laboratoire français CNRS/ Université de
Montepellier II), Quattro est deux fois plus rapide que tous les autres
robots industriels de ce type existants aujourd'hui sur la
planète.
Le secret tient ici sur les solutions innovantes mises au point par les
chercheurs, autant sur la forme de ce robot parallèle que
sur son système de commande.
Il s'appelle Adept Quattro. On dirait un peu une araignée
avec ses 4 bras d'ergonomie différente. Sorti de
l'imagination de cerveaux européens, il s'agit du robot
industriel manipulateur le plus rapide du monde. Conçu par
la fondation espagnole Fatronik, en collaboration avec le LIRMM
(laboratoire français CNRS/ Université de
Montepellier II), Quattro est deux fois plus rapide que tous les autres
robots industriels de ce type existants aujourd'hui sur la
planète.
Le secret tient ici sur les solutions innovantes mises au point par les
chercheurs, autant sur la forme de ce robot parallèle que
sur son système de commande.
 Des calculs d'optimisation de la dimension de chaque composant ont
été réalisés pour obtenir
une accélération maximale, adaptée aux
contraintes de l'industrie grâce au système de
commande du robot, qui limite les vibrations, donc le temps
nécessaire au robot pour déposer une
pièce à un endroit précis.
Résultat : l'engin peut manipuler 240 pièces par
minute et atteint des accélérations de 200
mètres par seconde carrée avec des charges de
deux kilogrammes, contre 100 mètres par seconde
carrée et un kilogramme pour les robots actuels.
Des calculs d'optimisation de la dimension de chaque composant ont
été réalisés pour obtenir
une accélération maximale, adaptée aux
contraintes de l'industrie grâce au système de
commande du robot, qui limite les vibrations, donc le temps
nécessaire au robot pour déposer une
pièce à un endroit précis.
Résultat : l'engin peut manipuler 240 pièces par
minute et atteint des accélérations de 200
mètres par seconde carrée avec des charges de
deux kilogrammes, contre 100 mètres par seconde
carrée et un kilogramme pour les robots actuels.
La prothèse agile est née  Le docteur Paul Chappell et son équipe réalise
une main artificielle, qui pèse seulement 400 grammes, et
où les cinq doigts se meuvent indépendamment les
uns des autres.
Le docteur Paul Chappell et son équipe réalise
une main artificielle, qui pèse seulement 400 grammes, et
où les cinq doigts se meuvent indépendamment les
uns des autres.
|
|
Les références Up Page Réseau Pepe Automates Intelligents Cybersciences Science & Vie novembre 2005 n°1058 Vie Artificielle Pourquoi ce site Je crois que, si les êtres humains que nous sommes ne parviennent pas toujours à évoluer comme ils le souhaiteraient _à s'épanouir professionnellement, sentimentalement et sexuellement (ce que j'appelle les trois pôles d'intérêts) c'est parce qu'il y a des barrages qui entravent leur désir d'accéder à un rêve inachevé. Je pars du principe que tout est possible, à condition de s'entourer de gens qui nous poussent à croire en nous. Contribuer au Réseau Pepe Ce site est avant tout une encyclopédie ouverte à l'imagination et au savoir, où chacun(e) d'entre vous peut participer. Si vous avez envie de partager une passion, ou si vous sentez le besoin de vous exprimer sur un point précis, je vous invite à m'adresser un e-mail (adresse électronique accessible sur ma page d'accueil). |
|
Mais encore Up Page Ce que vous avez toujours voulu savoir 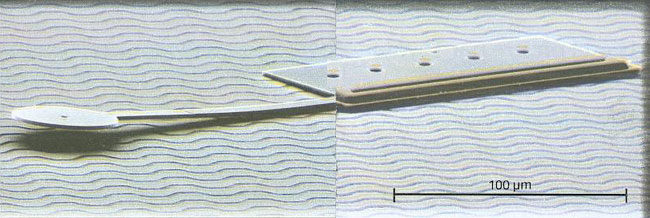
|