Accueil Arborescence Page précédente

|
Robot humanoïde HRP-2
La petite histoire Comprendre simplement Domaines de présence Son interprétation dans l'avenir Les références Mais encore |
|
by Pepe © Accueil Arborescence Page précédente |
|
|
|
La petite histoire Up Page Robot-humanoïde franco-japonais  HRP-2, le robot humanoïde était à
Toulouse le 22 mai 2006 au sein du Laboratoire d'Analyse et
d'Architecture des Systèmes (LAAS) du CNRS. Né au
Japon en 2003, mesurant 1,54 m pour un poids de 58 kg, c'est l'un des
quinze robots de ce type conçus par l'AIST (Institut
national de la science et des technologies industrielles
avancées) dans le cadre de l'Humanoid Robotics Project,
grand programme de recherche en robotique conduit à
l'initiative du ministère japonais de l'économie,
du commerce et de l'industrie (METI).
HRP-2, le robot humanoïde était à
Toulouse le 22 mai 2006 au sein du Laboratoire d'Analyse et
d'Architecture des Systèmes (LAAS) du CNRS. Né au
Japon en 2003, mesurant 1,54 m pour un poids de 58 kg, c'est l'un des
quinze robots de ce type conçus par l'AIST (Institut
national de la science et des technologies industrielles
avancées) dans le cadre de l'Humanoid Robotics Project,
grand programme de recherche en robotique conduit à
l'initiative du ministère japonais de l'économie,
du commerce et de l'industrie (METI).Quittant pour la première fois l'archipel nippon, cette "plate-forme de robotique humanoïde", fabriquée par Kawada Industries, va permettre le développement de quatorze projets de recherche d'une durée de deux à trois ans, issus d'une dizaine d'équipes françaises. D'autres projets viendront rapidement enrichir les travaux menés sur ce qui devient une plateforme de recherche à vocation nationale. Au printemps 2006, le robot humanoïde HRP2 est arrivé en France au LAAS (Laboratoire d'Analyse et d'Architecture des Systèmes) dans le cadre du Joint Robotics Laboratory, laboratoire franco-japonais. Les chercheurs sont en train de compléter ses aptitudes physiques par des capacités de calcul et de raisonnement lui conférant toujours plus d'autonomie dans la maîtrise de ses fonctions sensori-motrices. HRP2 est pour cela équipé de caméras pour la vision et de capteurs d'effort et d'attitude pour la gestion de son équilibre, la planification et le contrôle de ses actions. HRP2 salue son public à la fin de chaque démonstartion. |
|
Comprendre simplement Up Page Degrés de liberté Il a 30 degrés de liberté (ddl), c'est à dire 30 moteurs contrôlés, y compris les deux ddl au torse. Une des caractéristiques de ce robot est la conception compacte; notamment la suppression du "sac à dos" (que la plupart de robots humanoïdes possèdent) qui permet au robot de s'étendre par terre et se lever grâce à deux articulations au torse. De plus, le type "cantilever" de l'articulation de la hanche le rend capable de se déplacer dans des passages étroits. Enfin, le robot a une main spécifique dotée d'un mécanisme de pince pour saisir des objets. 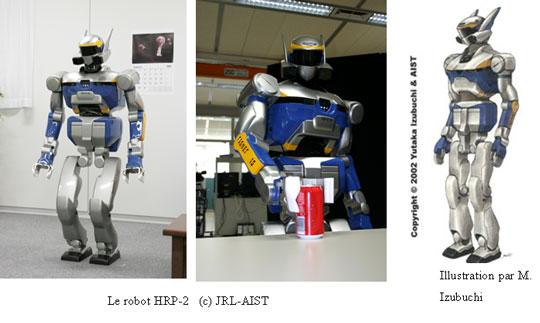 Le robot est équipé par de nombreux capteurs pour
acquérir les informations nécessaires
à son fonctionnement. D'abord, un capteur d'effort est
installé à chaque cheville à partir
duquel une mesure de stabilité qui s'appelle
"ZMP" (Zero
Moment Point) est obtenue pour effectuer l'asservissement de
stabilité.
Le robot est équipé par de nombreux capteurs pour
acquérir les informations nécessaires
à son fonctionnement. D'abord, un capteur d'effort est
installé à chaque cheville à partir
duquel une mesure de stabilité qui s'appelle
"ZMP" (Zero
Moment Point) est obtenue pour effectuer l'asservissement de
stabilité.
 Des capteurs d'efforts sont aussi
installés au niveau des poignets.
L'accéléromètre et le gyroscope sont
utilisés pour maintenir la stabilité en mesurant
l'attitude du robot. Dans sa tête, nous avons
demandé une option de deux paires de caméras
"double-foyers".
Une paire en haut permet de regarder des objets de
près, et l'autre en bas est dédiée
à la vision de loin. On envisage de les exploiter pour la
reconnaissance des environnements, pour la navigation autonome et pour
la reconnaissance des figures humaines dans l'interaction homme-robot.
Des capteurs d'efforts sont aussi
installés au niveau des poignets.
L'accéléromètre et le gyroscope sont
utilisés pour maintenir la stabilité en mesurant
l'attitude du robot. Dans sa tête, nous avons
demandé une option de deux paires de caméras
"double-foyers".
Une paire en haut permet de regarder des objets de
près, et l'autre en bas est dédiée
à la vision de loin. On envisage de les exploiter pour la
reconnaissance des environnements, pour la navigation autonome et pour
la reconnaissance des figures humaines dans l'interaction homme-robot.
Le robot est équipé d'un double système de vision: deux caméras dans ses "oreilles" pour voir de près, deux caméras derrière sa visière pour voir de loin. |
|
Domaines de présence Up Page Capacité à se déplacer 

|
|
Son interprétation dans l'avenir Up Page Capacité d'évitement Roadmap L'asservissement dynamique pour la locomotion bipède est étudié intensivement et de nombreuses méthodes ont été proposées pour la génération de mouvement. Le rôle de ce générateur de ce module (Pattern Generator) est de fournir au robot le mouvement "dynamiquement stable" pour la locomotion, c'est-à-dire que le robot est en locomotion dynamique et que la nature même du mouvement lui permet de garder l'équilibre. Ces études sur le mouvement dynamique se focalisent sur la locomotion. Il reste que les mouvements dynamiques sans collision en 3D pour effectuer des tâches par la partie supérieure du corps n'ont pas été bien creusés jusqu'à présent. 
D'un autre côté, la planification de mouvement en 3D pour des structures mécaniques avec des chaînes cinématiques complexes ont beaucoup évolué dans ces quelques dernières années. Grâce à des méthodes de recherche aléatoire qui ont fait des progrès remarquables, accompagnées par l'amélioration de la vitesse de calcul dans l'ordinateur, nous pouvons maintenant résoudre des problèmes très compliqués de planification de la trajectoire des robots avec facilité. Le principe de ces méthodes consiste à tirer des valeurs aléatoirement pour chaque ddl du robot, qui constituent un espace appelé "espace de configuration" où "la configuration" détermine la position et la posture du robot. Ensuite le planificateur essaie de valider chaque configuration: si elle est en collision, on la rejette. Puis on essaie de connecter deux configurations valables par un chemin local, ce qui construit un graphe dont les nœuds et les arêtes correspondent à des configurations et des chemins locaux. Ce graphe entre les configurations est appelé "roadmap". Quand ce graphe atteint une certaine taille, finalement on fait la recherche pour lier les configurations initiales et finales. Récemment des algorithmes très efficaces ont été développés pour accélérer cette procédure. 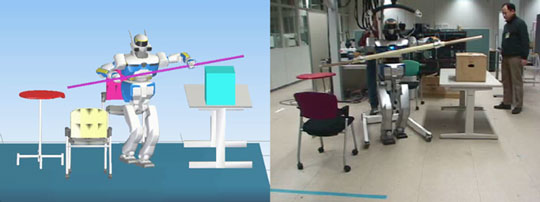
Supposons que le robot ait comme tâche de transporter une longue barre dans un environnement encombré; il n'est pas judicieux d'essayer de déterminer tous les angles articulaires dans cette planification de mouvement. Dans un premier temps, on fait une approximation avec une boîte englobante avec une barre pour réduire le nombre de degrés de liberté et le planificateur fournit un « chemin » au robot. Ainsi, le mouvement de la partie supérieure incluant les bras sans collision est planifié par rapport au chemin de la barre. 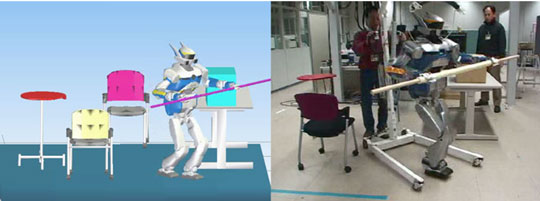
Ces sorties du planificateur sont traitées par la deuxième étape, le générateur de mouvements dynamiques. Si la sortie du générateur n'a pas de collisions, c'est gagné ; c'est la solution que l'on voulait. Mais il est bien probable que la prise en compte de la dynamique crée de nouvelles collisions dues à des déviations par rapport à la trajectoire planifiée qui n'inclut pas la dynamique. La simulation et l'expérimentation de planification de mouvement dynamique en 3D dans un environnement encombré. Une trajectoire a été planifiée qui permet au robot de transporter la barre en évitant les obstacles dans l'espace 3D en même temps de garder l'équilibre pendant la locomotion dynamique. |
|
Les références Up Page Réseau Pepe Futura-sciences Pourquoi ce site Je crois que, si les êtres humains que nous sommes ne parviennent pas toujours à évoluer comme ils le souhaiteraient _à s'épanouir professionnellement, sentimentalement et sexuellement (ce que j'appelle les trois pôles d'intérêts) c'est parce qu'il y a des barrages qui entravent leur désir d'accéder à un rêve inachevé. Je pars du principe que tout est possible, à condition de s'entourer de gens qui nous poussent à croire en nous. Contribuer au Réseau Pepe Ce site est avant tout une encyclopédie ouverte à l'imagination et au savoir, où chacun(e) d'entre vous peut participer. Si vous avez envie de partager une passion, ou si vous sentez le besoin de vous exprimer sur un point précis, je vous invite à m'adresser un e-mail (adresse électronique accessible sur ma page d'accueil). |
|
Mais encore Up Page Ce que vous avez toujours voulu savoir |