Accueil Arborescence Page précédente

|
Exosquelette
HAL, l'Exosquelette robotisé Avancée entre le HAL-3 et le HAL-5 Premier exosquelette intelligent Production en série Les références Mais encore |
|
by Pepe © Accueil Arborescence Page précédente |
|
|
|
La petite histoire Up Page HAL, l'Exosquelette robotisé HAL-5B, présenté par Yoshiyuki Sankai  Cyberdyne, une entreprise japonaise spécialisée
dans la robotique, vient de débuter la production en
série de HAL, un exosquelette motorisé
d’assistance musculaire.
Cyberdyne, une entreprise japonaise spécialisée
dans la robotique, vient de débuter la production en
série de HAL, un exosquelette motorisé
d’assistance musculaire.HAL (Hybrid Assistive Limb) n'a rien à voir avec son homonyme, vedette du célèbre film 2001, l'Odyssée de l’Espace. Lui existe réellement et, bien que moins imposant, n’aurait certainement pas dépareillé à bord de l’Explorateur 1 décrit par Arthur C. Clarke. L’idée de l'exosquelette n’est pas nouvelle. D’autres avaient déjà rêvé d’un appareillage équipé de membres artificiels actionnés par des moteurs électriques suffisamment léger et compact, pouvant être revêtu par un être humain. Il en décuplerait les forces ou bien rendrait la mobilité à des personnes atteintes de paralysie. Alors que les appareils développés jusqu’à présent se révélaient lourds, encombrants et peu performants, le Japonais Yoshiyuki Sankai, de l'université Tsukuba, a mis au point et développé HAL, premier exosquelette destiné à être commercialisé par la société Cyberdyne. |
|
Comprendre simplement Up Page Avancée entre le HAL-3 et le HAL-5 Le premier modèle, nommé HAL-3, n’assistait que la moitié inférieure du corps et se révélait assez encombrant. Utilisé comme banc d’essai, il a ensuite permis la réalisation du premier prototype de HAL-5, équipé de bras et de jambes, beaucoup plus léger. Le 16 avril 2008 débutait la construction d’une usine destinée à la production du modèle définitif réunissant toutes les qualités voulues en vue d’une commercialisation, répondant au nom de code HAL-5B. |
|
Domaines de présence Up Page Le premier exosquelette intelligent 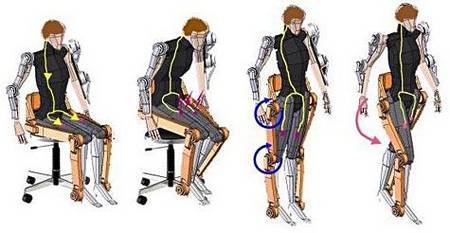 D’une taille de 1,60
mètre pour un poids de 23 kg (dont 15 kg pour la partie
destinée à la marche), HAL-5B est
alimenté par une batterie de 100 volts qui lui assure une
autonomie de 160 minutes en fonctionnement continu.
L’éventail des tâches qu’il
lui est possible d’accomplir est vaste, et comprend les
gestes du quotidien, comme par exemple marcher, grimper ou descendre
des escaliers, soulever une masse ou porter des objets lourds.
D’une taille de 1,60
mètre pour un poids de 23 kg (dont 15 kg pour la partie
destinée à la marche), HAL-5B est
alimenté par une batterie de 100 volts qui lui assure une
autonomie de 160 minutes en fonctionnement continu.
L’éventail des tâches qu’il
lui est possible d’accomplir est vaste, et comprend les
gestes du quotidien, comme par exemple marcher, grimper ou descendre
des escaliers, soulever une masse ou porter des objets lourds.La principale innovation de HAL réside dans ses deux modes de fonctionnement, soit contrôlé par la personne soit autonome. Contrôle bio-cybernétique En mode dit de contrôle bio-cybernétique, HAL perçoit, à l’aide de capteurs répartis sur la peau, les faibles flux électriques émis par le cerveau et destinés à transmettre les ordres de mouvement aux muscles du porteur. Routées vers un microprocesseur, ces informations aident HAL à déterminer la nature du mouvement à générer, ainsi que son ampleur et la puissance adéquate à y consacrer. Le système informatique embarqué commande ensuite les unités motrices actionnant les articulations de l’appareillage, et cela avant même que les muscles véritables de l’utilisateur entrent en action. Mode autonome Un second mode est dit autonome, car il se base sur les informations déjà stockées dans la mémoire de HAL. Chaque mouvement de base, comme se lever d’une chaise, grimper des marches, est décomposé en séquences successives formant une action déterminée, mise en relation avec les mouvements correspondants. La base de données dans laquelle HAL peut puiser en permanence n’est pas figée, mais bien mise à jour en permanence en fonction des mouvements perçus par les capteurs. Ainsi, une mauvaise transmission des données, ou même la défaillance d’un capteur n’entravera que rarement une action en cours, que HAL poursuivra de façon autonome. |
|
Son interprétation dans l'avenir Up Page Production en série  Cyberdine prévoit dans un premier temps une production en
série de 500 unités par an, qui seront
proposées en location aux hôpitaux, centres de
soins ou maisons de repos voire les salles de sport. Takashi Hama, un
des responsables de l'entreprise, confie qu’il
étudie aussi la possibilité d'utiliser HAL sur
les chantiers de construction où il pourrait aider au
transport et à la manipulation de charges importantes.
Cyberdine prévoit dans un premier temps une production en
série de 500 unités par an, qui seront
proposées en location aux hôpitaux, centres de
soins ou maisons de repos voire les salles de sport. Takashi Hama, un
des responsables de l'entreprise, confie qu’il
étudie aussi la possibilité d'utiliser HAL sur
les chantiers de construction où il pourrait aider au
transport et à la manipulation de charges importantes.Yoshiyuki Sankai n’y voit aucun inconvénient, affirmant que cette technologie n’est utile que si elle est mise au service de l’Homme, mais refuse par avance toute application à des fins militaires. |
|
Les références Up Page Réseau Pepe Futura-Sciences Pourquoi ce site Je crois que, si les êtres humains que nous sommes ne parviennent pas toujours à évoluer comme ils le souhaiteraient _à s'épanouir professionnellement, sentimentalement et sexuellement (ce que j'appelle les trois pôles d'intérêts) c'est parce qu'il y a des barrages qui entravent leur désir d'accéder à un rêve inachevé. Je pars du principe que tout est possible, à condition de s'entourer de gens qui nous poussent à croire en nous. Contribuer au Réseau Pepe Ce site est avant tout une encyclopédie ouverte à l'imagination et au savoir, où chacun(e) d'entre vous peut participer. Si vous avez envie de partager une passion, ou si vous sentez le besoin de vous exprimer sur un point précis, je vous invite à m'adresser un e-mail (adresse électronique accessible sur ma page d'accueil). |
|
Mais encore Up Page Ce que vous avez toujours voulu savoir |